
Tesla แก้ปัญหาการตรวจจับสิ่งกีดขวางทั่วไปบนท้องถนนได้แล้ว โดยจะใช้ Occupancy Networks สแกนผื้นผิวรอบ ๆ แบบ 3 มิติ ซึ่งอาจทพให้ระบบ Full Self-Driving หรือ Autopilot ปลอดภัยมากขึ้น หลีกเลี่ยงการชนสิ่งกีดขวางได้มากขึ้น!
Tesla จะใช้ Occupancy Networks ตรวจจับสิ่งกีดขวางโดยรอบ ลดอัตราการเกิดการชน
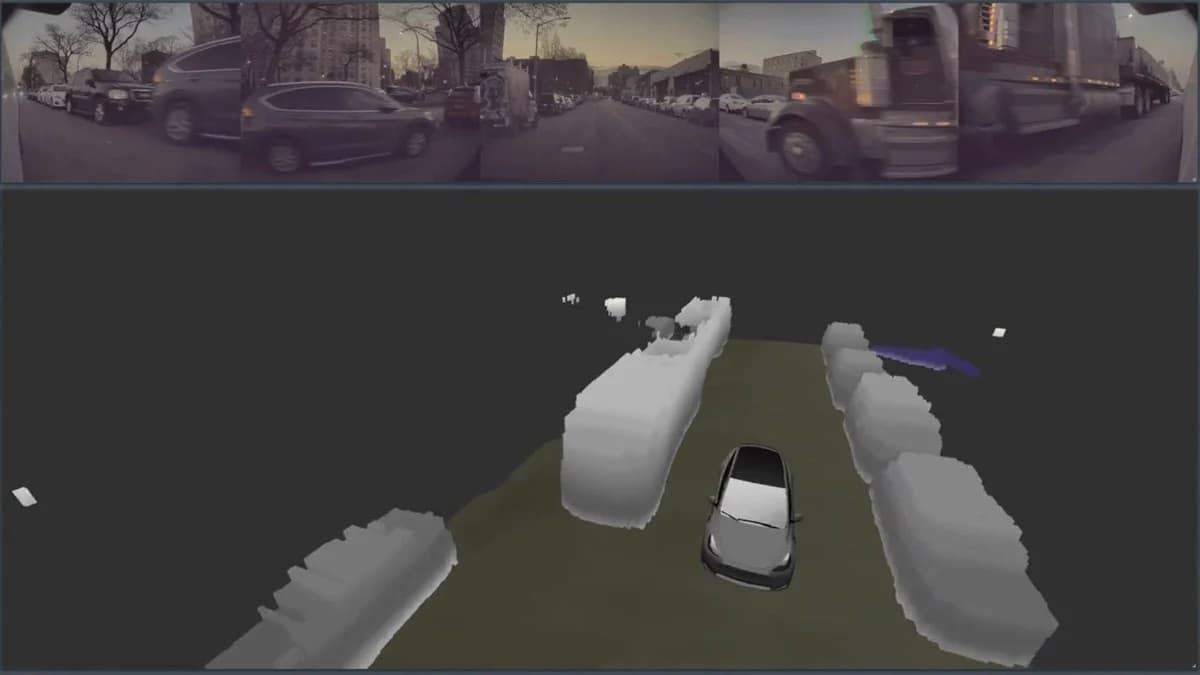
ทีม Autopilot ของ Tesla แบ่งปันความคืบหน้าในการประชุม CVPR ว่าทางทีมได้พบวิธีแก้ปัญหาการตรวจจับสิ่งกีดขวางทั่วไป เพื่อใช้ในการหลีกเลี่ยงการชนแล้ว โดยจะใช้ Occupancy Networks เป็นการสแกนตรวจหาวัตถุรอบ ๆ โดยใช้หลักการ 3 มิติ
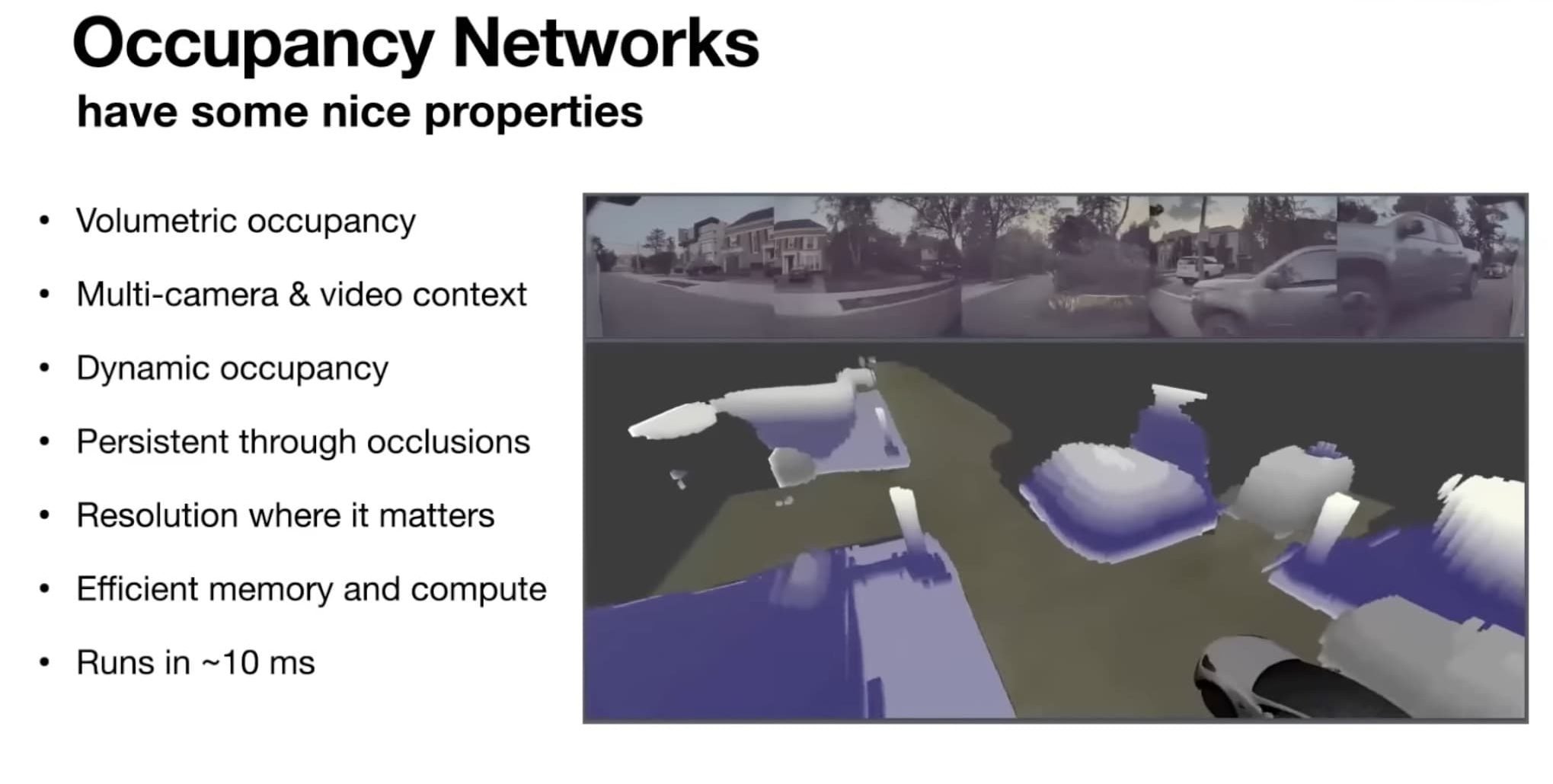
- Occupancy Networks – เครือข่ายแสดงพื้นผิว 3 มิติ มีตัวแยกประเภทเครือข่ายนิวรัลลึก โดยจะมีการเข้ารหัสคำอธิบายของผลลัพธ์ที่เป็น 3D ที่ให้ความละเอียดแบบไม่มีที่สิ้นสุด และที่สำคัญคือใช้หน่วยความจำน้อย
- หลักการทำงานของ Occupancy Networks ที่ทีม Autopilot ของ Tesla พูดถึงก็คือ จะเป็นการคาดการณ์เชิงปริมาตรของทุกสิ่งรอบ ๆ รถ ที่ทุก ๆ ความหนาแน่น ในแต่ละจุดแบบ 3 มิติ การเคลื่อนไหวที่เป็นไปได้ในอนาคต ซึ่งจะเป็นประโยชน์ต่อการแสดงสิ่งกีดขวางในระบบ Autopilot นั่นเอง
ช่วง 10 ปีที่ผ่านมา เทคโนโลยีที่ทันสมัยหลาย ๆ อย่างต้องอาศัยการคิดและรูปแบบการทำงานของระบบแบบ 3 มิติ เนื่องจากโลกทางกายภาพที่เราอาศัยอยู่นั้นไม่ใช่โลก 2 มิติ แต่เป็นโลก 3 มิติ ที่ประกอบไปด้วยความกว้าง ความยาวและความสูง (ดังนั้น เทคโนโลยีนี้จึงจำเป็นต่อระบบอัจฉริยะต่าง ๆ ที่อยู่ในสินค้า ของใช้ การเสพย์สื่อ การเดินทาง และอื่น ๆ
Occupancy Networks จะช่วยให้รถสามาหลีกเลี่ยงสิ่งกีดขวางที่ตรวจพบรอบ ๆ ช่วยให้รถสามารถมองเห็นมุมมองรอบ ๆ โดยการสร้างภาพจำลองรอบ ๆ และคาดการณ์การเคลื่อนที่ของวัตถุโดยรอบ ทำให้เราสามารถเลี้ยวโดยไม่มีการป้องกันได้
ทางทีม Tesla บอกว่า ระบบ Autopilot ของ Tesla ในตอนนี้สามารถป้องกันอุบัติเหตุได้ประมาณ 40 ครั้ง/วัน ในเคสที่ผู้ขับขี่เหยียบแป้นคันเร่งผิดพลาดแทนแป้นเบรก
การปรับปรุงหลายอย่างเหล่านี้จะมาพร้อมซอฟต์แวร์ Full Self-Driving เวอร์ชัน 10.69 Beta สำหรับรถ Tesla ในอเมริกาและแคนาดาก่อน
แม้ว่ารถ Tesla จะยังไม่สามารถหลีกเลี่ยงการชนได้ 100% แต่ทางทีม Autopilot ของบริษัทก็มีความพยายามอย่างมากที่จะทำให้เป็นจริง ความก้าวหน้าทางเทคโนโลยีนี้จึงน่าสนใจสำหรับรถ Tesla ที่มีระบบ Autopilot ค่ะ
ที่มา – Tesmanian